Design Project 2Ba IWT, Vrije Universiteit Brussel, 2014

Stairclimbingrobot
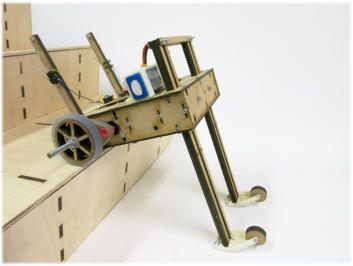
Automatisation process
To make the robot drive as easy as possible, the whole stair climbing part was automated. This was carried out by measuring the time it took to
execute all the commands to climb one stair. This seemed to work fine at
first, but unfortunately it has one major drawback: the battery. When the
robot moves and even when it awaits a command, the battery drains. This
loss in tension results in a loss in power and subsequently in a loss of
torque. As a consequence the robot will take longer performing every
command. Because the required time does not match the preliminary
defined time anymore, the robot may fail and fall of the stairs which is not
ideal. However a solution exists. By mounting a proximity sensor to the
bottom and to the front of the robot the exact position could be known.
Replacing the timings by distances would solve the problem, making the
automated driving function almost fail proof. Unfortunately the constraint
of time made it impossible to execute this modification, however it is
recommended.
was automated. This was carried out by measuring the time it took to
execute all the commands to climb one stair. This seemed to work fine at
first, but unfortunately it has one major drawback: the battery. When the
robot moves and even when it awaits a command, the battery drains. This
loss in tension results in a loss in power and subsequently in a loss of
torque. As a consequence the robot will take longer performing every
command. Because the required time does not match the preliminary
defined time anymore, the robot may fail and fall of the stairs which is not
ideal. However a solution exists. By mounting a proximity sensor to the
bottom and to the front of the robot the exact position could be known.
Replacing the timings by distances would solve the problem, making the
automated driving function almost fail proof. Unfortunately the constraint
of time made it impossible to execute this modification, however it is
recommended.