Design Project 2Ba IWT, Vrije Universiteit Brussel, 2014

Stairclimbingrobot
Electronics
The robot needs electronics to be controlled. The arduino is the
most important part of them and was already discussed. Still four
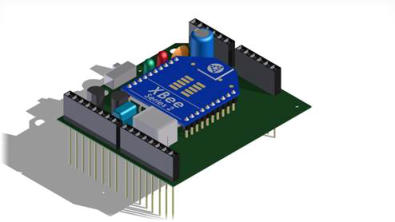
expansion shields were necessary. one of these was used to
connect the Xbee with the Arduino Uno. The other three were used
for the motors
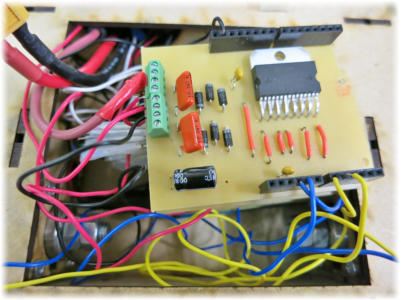
The Arduino is not intended to drive motors, although the robot needs them to move. Its primary goal is to send and receive signals, hence the
name microcontroller. The reason motors cannot be connected directly to
the Arduino is because they need a high tension and a high current, both
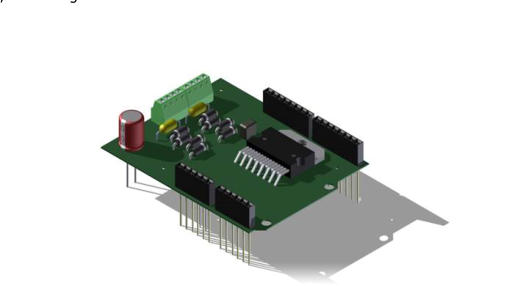
of which this microcontroller is unable to provide. The solution is a shield
with an H-Bridge. This integrated circuit consists of transistors that will
amplify the signal send by the Arduino and output it to the motors. The
greater tension then provided will increase the motor’s rotational speed.
Because the motor is not directly connected to the Arduino, no damage
can be caused by a too high current.
them to move. Its primary goal is to send and receive signals, hence the
name microcontroller. The reason motors cannot be connected directly to
the Arduino is because they need a high tension and a high current, both
of which this microcontroller is unable to provide. The solution is a shield
with an H-Bridge. This integrated circuit consists of transistors that will
amplify the signal send by the Arduino and output it to the motors. The
greater tension then provided will increase the motor’s rotational speed.
Because the motor is not directly connected to the Arduino, no damage
can be caused by a too high current.